Für ein aktuelles Embedded-Projekt habe ich eine Kaffeemaschinen-Simulation auf Basis des STM32H750B-DK mit TouchGFX umgesetzt. Ziel war es, eine moderne, lauffähige und sauber strukturierte Demo-Anwendung zu entwickeln, die nicht nur die grafische Oberfläche zeigt, sondern auch die technische Architektur im Hintergrund nachvollziehbar abbildet.
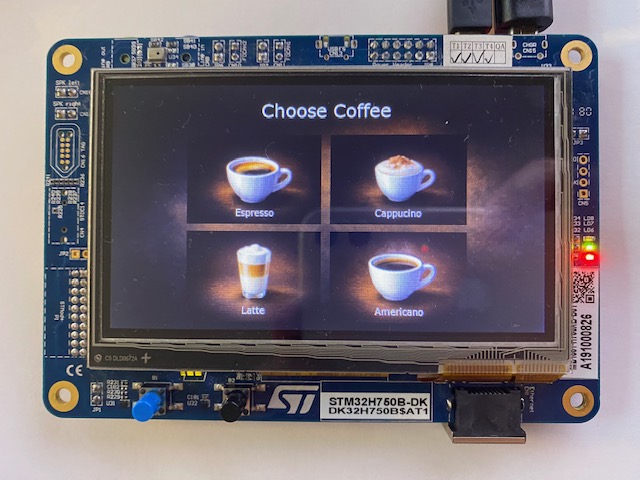
Das Projekt umfasst dabei deutlich mehr als nur eine GUI:
Es beinhaltet die Treiberanbindung, die Applikationsstruktur, die Display-Assets, die Systemintegration sowie die begleitende technische Dokumentation.
Besonders spannend war für mich die Art der Umsetzung:
Die Software wurde gemeinsam mit ChatGPT Codex entwickelt. KI war dabei nicht einfach ein Werkzeug für einzelne Code-Snippets, sondern ein echter Entwicklungsbeschleuniger bei Architektur, Implementierung, Strukturierung und Dokumentation.
Das Ergebnis zeigt sehr deutlich, welches Potenzial in der Zusammenarbeit von erfahrenem Embedded-Engineering und moderner KI-gestützter Softwareentwicklung steckt:
Was früher häufig mehrere Entwickler über Wochen beschäftigt hätte, konnte in sehr kurzer Zeit als funktionsfähiges und strukturiertes System aufgebaut werden.
Technisch steht das Projekt für einen Ansatz, der aus meiner Sicht künftig immer wichtiger wird:
Embedded-Software wird nicht ersetzt, aber durch KI massiv beschleunigt.
Entscheidend bleibt dabei die fachliche Führung: Architekturverständnis, Hardwarebezug, Systemdenken und die Fähigkeit, aus Anforderungen eine robuste technische Lösung zu formen.
Das Projekt auf GitHub:
Coffee Machine Simulation
GitHub-Projekt ansehen
Mein Fazit:
Die Kombination aus Embedded-Architektur, UI-Entwicklung und KI-gestützter Umsetzung eröffnet neue Möglichkeiten für Prototyping, Produktentwicklung und technische Demonstratoren – gerade auch im industriellen Umfeld.